18 marzo 2010
Progetto nato nei laboratori di Udine e Pordenone del Gruppo di Meccatronica
Robot e neurochirurgia: nuovo dispositivo per terapie antitumorali a bassa invasività
Indirizza i raggi X contro le lesioni al cervello con massima precisione e sicurezza


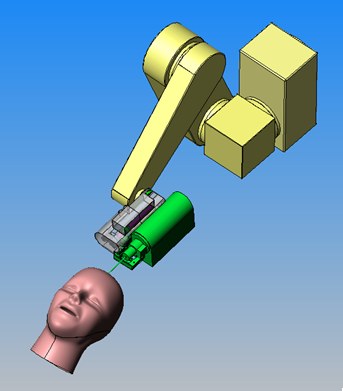
Il LANS (verde) e il robot (giallo) per neurochirurgia
1/2

Il Gruppo di Meccatronica dell’Università di Udine ha inventato un dispositivo robotico per applicare, con la massima precisione e sicurezza, la terapia chirurgica minimo-invasiva ai raggi x alle lesioni tumorali del cervello. Il sistema permette al neurochirurgo di muovere nel cranio del paziente una sorgente miniaturizzata di radiazioni a bassa intensità (lo strumento chirurgico), in condizioni di maggiore controllo rispetto alla procedura manuale. Il nuovo dispositivo è in grado di modulare l’intensità dei raggi x e di indirizzare la dose di radiazioni programmata verso la lesione tumorale, evitando di colpire le regioni sane del tessuto cerebrale. Grazie al sistema robotico nato all’ateneo friulano la radioterapia intracranica è utilizzabile anche per le lesioni di forma allungata, molto più frequenti di quelle di tipo sferoidale, le sole alle quali si applica l’operazione manuale.
Il dispositivo, denominato “Attuatore lineare per neurochirurgia” (Linear Actuator for Neuro-Surgery – LANS), ha superato con successo i test preclinici effettuati presso la Clinica neurochirurgica dell’Ospedale di Firenze. Giudicato la migliore applicazione di misura e automazione dell’anno, il sistema robotico, sviluppato in particolare dal ricercatore Vanni Zanotto, ha ricevuto il premio “Nicola Chiari 2010”. Al concorso, che premia l’eccellenza nelle applicazioni di automazione industriale e non, hanno partecipato oltre cinquanta tra aziende, università e centri di ricerca. Il progetto LANS s’inserisce nell’attività svolta dalla sezione di Robotica medica del Gruppo di ricerca di Meccatronica, coordinato dal professor Alessandro Gasparetto, del dipartimento di Ingegneria elettrica, gestionale e meccanica dell’Università di Udine. «Un risultato – afferma Gasparetto – che conferma l’eccellente livello della ricerca scientifica svolta dal gruppo di Meccatronica dell’ateneo nei suoi laboratori dislocati sia nella sede di Udine che in quella di Pordenone». Al progetto ha collaborato anche il Gruppo di ricerca in Meccatronica dell’Università di Padova, coordinato dal professor Aldo Rossi.
Le operazioni di neurochirurgia richiedono elevatissime precisioni di posizionamento e sono considerate il settore ideale per l’applicazione della robotica nel campo chirurgico. «Precisione e ripetibilità di un robot – spiega Alessandro Gasparetto – sono notevolmente superiori a quanto mai potrebbe realizzare il più bravo ed esperto dei chirurghi». Tuttavia il robot non è in grado di rispondere in modo immediato e autonomo a eventi pericolosi e inattesi. «Di conseguenza – chiarisce l’ingegner Vanni Zanotto – non è possibile demandare al robot l’intera procedura chirurgica e quindi generalmente si adotta un approccio chiamato “master-slave”, cioè “padrone-schiavo”». Il chirurgo agisce su un opportuno dispositivo, il master, per imporre i movimenti al robot, lo slave, che compie l’operazione. «In questo modo – spiega Zanotto – la precisione di posizionamento è realizzata tramite il robot, ma la decisione delle operazioni rimane di competenza del chirurgo».
Nel caso del dispositivo realizzato all’Università di Udine, il movimento della sonda all’interno della cavità cranica è determinato dal chirurgo che opera nel master. «Il chirurgo – specifica Zanotto – è comunque in grado di sentire in ogni momento le forze d’interazione tra la sonda e i tessuti cerebrali e agire di conseguenza. Inoltre, per migliorare la precisione dell’operazione, un ambiente virtuale serve da guida durante ogni fase dell’intervento».